




Maglev — одна из тех технологий, которые до сих пор кажутся волшебством, даже спустя годы после того, как они были впервые представлены. Хотя они уже давно служат основой транспортных систем некоторых крупных городов, они часто не влияют на повседневную жизнь людей, которые не используют их для поездок на работу. Но это может оказаться бесценным в другом месте — при исследовании Луны. Продолжаются споры о наилучшем способе транспортировки объектов на лунной поверхности, и команда из JPL и компания под названием SRI International считают, что у них есть решение — развертывание магнитной траектории на лунной поверхности.
Проект, известный как Система гибкого облета (FLOAT), имеет простую концепцию. Он основан на концепции, разработанной в SRI, которая позволяет размещать небольших роботов на платформе и точно контролировать их движения с помощью магнитной левитации. С точки зрения размера, как видно из видео ниже, технология пока еще невелика. Тем не менее, команда FLOAT получила грант от Института передовых концепций НАСА (NIAC) на исследование того, как масштабировать технологию, которая будет работать на Луне.
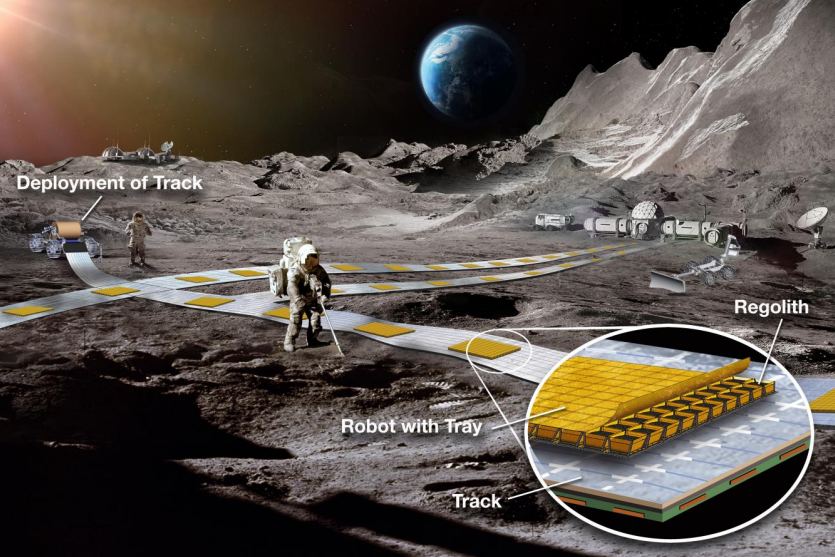
Возможно, самая важная часть технологии — это трасса. Он состоит из двух необходимых слоев и третьего дополнительного слоя. Базовый слой сделан из графита, что позволяет роботам использовать силу, называемую магнитолевитацией, чтобы парить над дорожкой. Второй слой представляет собой серию цепей, которые контролируют магнитные поля вокруг пути, позволяя пользователям подталкивать или останавливать тележки, движущиеся по пути. Дополнительный третий слой представляет собой серию солнечных панелей, которые могут собирать солнечную энергию, пока на этой стороне Луны есть дневной свет.

Кредит — Международный канал SRI на YouTube
Дело в том, что багги сами по себе мозги не нужны. Все питание и управление картами исходят от самой трассы — на самих картах нет батарей, логики или чего-либо еще. Это уменьшает фактический вес тележки, позволяя увеличить ее грузоподъемность.
Еще одна захватывающая идея, описанная в заключительном отчете команды, заключается в том, что гусеница FLOAT может быть изготовлена на предприятии, а затем развернута вездеходом, развертывая ее с катушки. Материал, из которого сделана гусеница, является гибким, что делает намотку идеальной методологией развертывания и значительно снижает стоимость, особенно по сравнению с обычным строительством дорог здесь, на Земле.
Еще одним преимуществом системы FLOAT является то, что она не будет выделять пыль после установки, что потенциально является одной из самых опасных частей исследования Луны. Расчеты команды показывают, что они могут поднимать тележки более чем в два раза выше высоты типичной частицы лунной пыли, позволяя им двигаться по рельсам, не нарушая уже присутствующую пыль. В отличие от Земли, на Луне нет воздуха, поэтому большие подъемники не будут мешать пыли по обеим сторонам пути, когда они проезжают.
Кредит — Канал KISSCalTech на YouTube
Однако существует вероятность того, что некоторое количество пыли может осесть на гусенице, особенно при ее первом развертывании или если поблизости выполняются другие действия (например, извлечение льда). Если это произойдет, система FLOAT может использовать специально разработанную тележку с прикрепленной к ее передней части щеткой для удаления пыли с гусеницы, прежде чем обычные тележки смогут продолжить работу на ней.
Даже холмы не кажутся большой проблемой — расчеты в последней статье показывают, что тележки могут двигаться с разумной скоростью вверх и вниз на 30%, не требуя много энергии. Эта возможность может значительно увеличить площади, которые может охватывать маршрут, и позволить большему количеству местоположений быть подключенными к сети FLOAT.
Главное здесь — возможность подключения, поскольку технология кэширования позволяет публиковать треки на любом количестве сайтов, будь то экономические, научные или логистические. Однако одна из основных проблем при масштабировании технологии заключается в том, как связать все эти ленты воедино. Соединение двух частей плавучей гусеницы остается одной из проблем, которая будет иметь ключевое значение для решения вопроса о том, будет ли когда-либо принята эта технология.
До такого внедрения, возможно, еще далеко, поскольку до миссий Artemis, которые начнут строительство лунной инфраструктуры, для которой потребуется такая система, еще далеко. Команда указывает, что у них может быть запущена операционная система к середине 2030-х годов — примерно в то время, когда будет работать постоянная лунная база. Но пока неясно, каково будущее проекта — на данный момент нет каких-либо заметных общедоступных источников финансирования. Тем не менее, когда мы установим там постоянное присутствие, несомненно, потребуется надежная транспортная система на Луне — и, возможно, будущая версия FLOAT обеспечит это.
Узнать больше:
Шаллер и др. FLOAT — Гибкая высота на трассе
УТ — магнитная левитация
UT — Лунная поверхность электрически заряжена, что может позволить парящему роботу исследовать ее.
UT — Магнитная камера может имитировать микрогравитацию (или гравитацию Марса) здесь, на Земле.
основное изображение:
Художественное изображение системы FLOAT в процессе.
Кредит — Schaller et al.

«Зомби-любитель-евангелист. Неизлечимый создатель. Гордый новатор в твиттере. Любитель еды. Интернетоголик. Жесткий интроверт».
More Stories
Новая функция форматирования в Google Sheets взволновала конвертеров Excel
Hinge тестирует новую функцию, которая не позволяет вам создавать новые подключения, поскольку приложение пытается устранить распространенную проблему.
Чат-боты становятся привлекательными в обновлении GPT-4o, поскольку пользователи готовятся к появлению «подружек с искусственным интеллектом»